For two days, we enjoyed and celebrated the achievements of our MX students of Robotics and Intelligent systems. The 13 graduation projects demonstrate clearly the learned skills and acquired knowledge including fundaments of robotics and its dynamics, robotic programming methods, artificial and machine learning methods, sensors and actuators for robots, path planning, and navigation, and finally human-robotic interaction. Although these students were coming from different backgrounds; mechanical engineering, electrical engineering, computer science, and computer engineering, all employ successfully the above fields of knowledge in their projects.
The projects are diversified that can attract the attention of different industries such as Oil and Gas, logistics, renewable energy, etc. Immediately after the announcement of the schedule of projects' presentations, three projects got the attention of Yokogawa Saudi Arabia Company! Below is a short description of each project along with some demos.
![]()
Project#1: Design of an Image Processing Corrosion Inspection Robot
A mobile image processing corrosion inspection robot, which is capable of one-dimensional inspection (along or around the object). It is wirelessly controlled via Bluetooth.

![]()
Project#2: Robotic System for Cleaning Photovoltaic Cells
A robotic solution capable of cleaning solar cells efficiently is developed. The cleaning robot starts moving horizontally across the panels to check for dust if there is any efficiency drop in the PV panels. The robotic system will not be triggered unless there is a voltage drop by 5% or more which means that approximately 70% of the panel surface is covered with dust. The robot has a self-charging system.

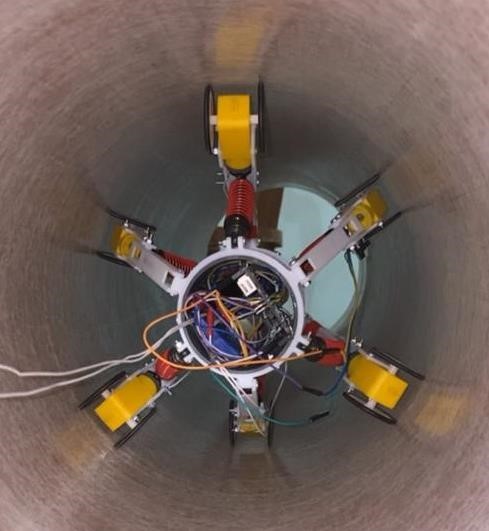
Project#3: In-Pipe Inspection Robot
An autonomous in-pipe inspection robot with an innovative design that adapts for varying diameters. The robot can detect and identify cracks inside the pipeline using a computer-vision algorithm and Convolutional neural network (CNN) model. The robot system can be integrated with a real-time cloud database that will instantly collect the robot's data using an internet connection. In addition, it can be integrated with a web-based central system to control and monitor the inspection process from anywhere and by an unlimited number of people.
Project#4: Autonomous Industrial security surveillance using UGV/UAV by (Majed Bati Alsubaie and Faris Zaini Konkar)
This project built a surveillance system using a ground robot and a drone. A custom drone was built. ROS is the main operating system for both the ground robot and the drone, for the localization and navigation system and mapping.

Project#5: Design and control of a hybrid flying-wheeled robot for transferring packages in warehouses by (Osama Albraiki)
We designed a warehouse hybrid drone robot that can fly, move on wheels, and pick items. The whole design of this robot was built from scratch using 3D printers. It uses suction cups with an air pump to grip the packages. This robot can move on the ground using the thrust force of the rotors to push the robot forward.

Project#6: Intelligent Assistant Shopping Cart by (Salam Alsaif and Abbas Alojami)
In this project, an autonomous service shopping cart was built. It operates in dense indoor environments such as shopping malls and airports. The cart is able to navigate to stores based on the user commanded destinations via a friendly and interactive user interface. It guides the user to the desired destination while avoiding obstacles in an indoor environment. It can be deployed in airports, shopping markets, etc.

Project#7: Deep Learning-Based Plant Disease Autonomous Detection System from UAV Imagery (By Abdullah Siddiqui)
A system that can detect diseased apple trees was designed, the system consists of a deep learning model, and a drone. The drone is used to navigate through the apple farm, and to capture photos of apple leaves. The photos then are passed to the deep learning model which then will predict if the tree is healthy or if it is diseased. It can distinguish 3 different diseases that can affect apple trees which are: apple scab, apple black rot, apple cedar rust. The system was simulated in ROS (robot operating system). Two different scenarios were simulated, one that uses the drone's camera and one that doesn't.

Project#8: Designing and Manufacturing of a Window Cleaning Robot for High-Rise Building by (Mohammed Abbas Albu Mijdad)
The climbing robot is a great human alternative in hazardous environments to save human lives and automate hard jobs. The main task in the climbing robots is the adhesion to the walls. The ability of the robot to handle its weight and move over a vertical surface is considered a serious gravity challenge. Different mechanisms are used to climb to a surface. It is important to mention that the project is including the mechanical design, control design, and programming algorithm.

Project#9: Autonomous Robot for Road Lines Markings: Inspection and Maintenance by (Abdulrahman Saleh Al-Batati)
According to statistics, the leading cause of death among young people is road car accidents. Moreover, one of the factors for road crashes is low-quality road infrastructure. Unfortunately, road lane markings – one of the most important signals – fade and deteriorate over time because of the paint quality, weather, and exposure to any external object. This project targets road markings maintenance with a novel idea to use machine vision for inspecting the line state while moving along the line, and if needed, the robot will repaint the road line. The software is made of a machine vision code using the OpenCV library in Python language. This code is implemented on the RPI to image process the feed from the camera and then communicate with Arduino using the Serial library.

Project#10: Medication Distributor Robot by (Fatimah Alsaffar)
one of the major aspects of pharmacy operation management is managing logistics services which are mainly medicines distribution systems. Inside hospitals' pharmacies, there is a long and complicated process for medication dispensing and distributing. In this project, we worked on developing a robotics solution to automate part of this process which is the medication distribution. Our solution is a Medication Distributor Robot that can receive medicine requests from healthcare staff inside the hospital such as nurses and doctors. Then deliver the medication autonomously to the target places and provide the required data through a report to help in managing the pharmacy inventory.